
4 Servo 4 Gradations HDDocuments disponibles : |
|
Carte de commande de 4 servomoteurs / servo-treuils / mini-servos et 4 gradations haute définition en Midi / Midi étendu
Page de la carte sur notre boutique : 4 Servos 4 PWM HD.
Cette carte s'utilise directement avec des actionneurs basse tension (moteurs CC, ampoules 12V, LEDs, électro-aimants, etc) et des servomoteurs que l'on veut piloter, sans carte fille pour la gradation PWM. Elle contient quatre sorties gradations PWM avec transistors de puissance et quatre sorties dédiées aux servomoteurs.

I - Connectique
-
Midi
- Entrée Midi In : elle reçoit les messages venant de l'ordinateur.
- Sortie Midi Out split : elle répète les instructions de l'entrée, et peut donc servir à brancher une autre carte en sortie, ce qui limite le nombre de ports Midi nécessaires en sortie de l'ordinateur.
- Une LED témoin (marquée Midi) clignote lors de la réception de messages Midi sur la carte.
-
3 Alimentations
- Alimentation électrique de la carte – Alim C Carte : ce module ne peut être alimenté qu'en tension continue, par tout bloc secteur/batterie dont la tension de sortie est comprise entre 9 V et 13 V. Une alimentation 12 V 0,5 à 1 Ampère répond à la plupart des besoins.
- Une LED témoin (marquée Carte) s'allume lorsque la carte est alimentée.
- Alimentation électrique des transistors de puissance – Alim P PWM (partie gradation) : l'alimentation doit être uniquement en continu et adaptée aux tensions maximales d'alimentation des actionneurs branchés sur la carte.
- Alimentation électrique des servomoteurs – Alim S Servo : l'alimentation doit se faire uniquement en continu et être adaptée à la tension des servomoteurs. Il s'agit souvent de 5 V.
Connexion des fils d'alimentation sur la carte : pour un module sans boitier, les fils d'alimentation doivent être dénudés proprement au bout sur 5 mm avant d'être vissés dans les dominos de la carte. Il y a une polarité à respecter (voir schéma ci-dessous). Brancher les alimentations à l'envers est destructeur pour la carte.
II – Branchement des actionneurs

Section Actionneurs PWM :
- Dominos de pilotage des actionneurs en gradation, chacun polarisé + / - :
- OUT1
- OUT2
- OUT3
- OUT4
- Domino d'alimentation des actionneurs, polarisé + / -, au milieu des sorties PWM :
- Alim PWM
Section Servomoteurs :
- Picots de branchement des servomoteurs :
- 1, 2, 3, 4
- Orientation des prises des servomoteurs :
- Com 5V 0V
- Domino d'alimentation des servomoteurs, polarisé + / - :
- Alim Servo
1) Actionneurs PWM
Types d'actionneurs pilotables avec ces sorties : moteurs à courant continu, LEDs de puissance, électro-aimants, ampoules halogènes, fils luminescents, barres de LEDs, etc...
Tension maximale des actionneurs : 24 V, correspondant au domino Alim PWM.
L'alimentation des actionneurs est située sur le domino au centre des sorties PWM. Elle est polarisée.
Les sorties sont marquées Out1, 2, 3 et Out4. Si l'actionneur est lui-même polarisé (LED, certains électroaimants, …), il faut respecter le sens + / - indiqué derrière chaque domino.
2) Servomoteurs
Les sorties sont numérotées de 1 à 4. Le fil des servomoteurs ne se branche que dans un sens, indiqué par Com 5V 0V, pour :
- Com = Commande, fil envoyant la commande de position au moteur ;
- 5V = côté (+) de l'alimentation, correspondant au fil rouge ou orange sur le connecteur du servo.
- 0V = côté (-) ou masse de l'alimentation, correspondant au fil noir ou marron sur le connecteur du servo.
La plupart des marques de servo ont les fils disposés dans ce sens, cependant il y a des exceptions. Il faut donc vérifier systématiquement le code couleurs du servo et sa correspondance dans la fiche technique du-dit moteur. Si l'ordre des fils est différent, il suffit de faire un adapteur qui place les fils dans le bon sens par rapport à la carte.
III - Configuration de la carte
La configuration de base est la suivante :
- Les Numéros de Control Change compris par la carte sont de 0 à 16,
- Le Canal est 1.
1 - Groupe de 8 interrupteurs

Canal
Les interrupteurs 1 à 3 servent à définir le canal Midi.
Numéro
Les interrupteurs 4 à 6 servent à définir le numéro de carte.
Résolution
L'interrupteur 7 permet de se mettre en
- Position basse mode 7 bits sur 127 pas, à la fois pour les actionneurs avec une fréquence de PWM de 16kHz et les servomoteurs. Il ne nécessite donc qu'un Control Change par sortie.
- Position haute mode 14 bits, les actionneurs sont sur 16384 pas et 8000 pas pour les servomoteurs, le tout nécessitant deux Control Change. Quel que soit le mode choisi, la fréquence de PWM des actionneurs reste à 16kHz (silencieux dans le cas d'utilisation de moteur). Dans le tableau de configuration de la carte se trouve les numéros de Control Change associés.
Si plusieurs cartes 4 servomoteurs 4 gradations sont utilisées en même temps, elles doivent porter des numéros différents ou obéir à des canaux Midi différents pour être pilotées indépendamment l'une de l'autre. Si deux cartes obéissent au même canal Midi et possèdent le même numéro, les actionneurs branchés à la même position sur chaque carte effectueront la même action.
2) Numéros de Control Change
TABLEAU DE CONFIGURATION DE LA CARTE
| Choix du canal par les switchs 1 à 3 | |||
|---|---|---|---|
| Canal | 1 | 2 | 3 |
| 1 | - | - | - |
| 2 | ON | - | - |
| 3 | - | ON | - |
| 4 | ON | ON | - |
| 5 | - | - | ON |
| 6 | ON | - | ON |
| 7 | - | ON | ON |
| 8 | ON | ON | ON |
| Choix du numéro de carte par les switchs 4 à 6 | |||
|---|---|---|---|
| N° Carte | 4 | 5 | 6 |
| 1 | - | - | - |
| 2 | ON | - | - |
| 3 | - | ON | - |
| 4 | ON | ON | - |
| 5 | - | - | ON |
| 6 | ON | - | ON |
| 7 | - | ON | ON |
| 8 | ON | ON | ON |
| Pour chaque actionneur, selon le numéro de carte, tableau indiquant le numéro de Control Change ou auquel l'actionneur obéit. mode 14 bits: CC entre parenthèse : poids fort (pas d'action CC sans parenthèse : poids faible (activation) mode 7 bits: CC entre parenthèse : ignoré CC sans parenthèse : activation |
|||||||
| Act 1 | Act 2 | Act 3 | Act 4 | Servo 1 | Servo 2 | Servo 3 | Servo 4 |
| 0 (8) | 1 (9) | 2 (10) | 3 (11) | 4 (12) | 5 (13) | 6 (14) | 7 (15) |
| 16 (24) | 17 (25) | 18 (26) | 19 (27) | 20 (28) | 21 (29) | 22 (30) | 23 (31) |
| 32 (40) | 33 (41) | 34 (42) | 35 (43) | 36 (44) | 37 (45) | 38 (46) | 39 (47) |
| 48 (56) | 49 (57) | 50 (58) | 51 (59) | 52 (60) | 53 (61) | 54 (62) | 55 (63) |
| 64 (72) | 65 (73) | 66 (74) | 67 (75) | 68 (76) | 69 (77) | 70 (78) | 71 (79) |
| 80 (88) | 81 (89) | 82 (90) | 83 (91) | 84 (92) | 85 (93) | 86 (94) | 87 (95) |
| 96 (104) | 97 (105) | 98 (106) | 99 (107) | 100 (108) | 101 (109) | 102 (110) | 103 (111) |
| 112 (120) | 113 (121) | 114 (122) | 115 (123) | 116 (124) | 117 (125) | 118 (126) | 119 (127) |
Exemple :
Si la carte porte le numéro 7 (Off/On/On pour les interrupteurs de 4 à 6), l'actionneur n°3 répond au Control Change 98 (et 106 si le mode 14 bits est actif). Il réagira en fonction de la valeur de ce Control Change. Le servomoteur n°2 répond au Control Change 101. Sa position réagira en fonction de la valeur de ce Control Change.
Pour le mode 14 bits, il faut envoyer d'abord la valeur du poids fort et ensuite celle du poids faible.
3) Sauvegarder la position des servomoteurs et l'intensité de la gradation
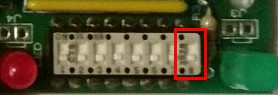
L'interrupteur 8 sur la carte (voir si dessus) permet de sauvegarder l'état des positions des servomoteurs ainsi que l'état de gradation des actionneurs. Pour sauvegarder il faut mettre l'interrupteur sur ON, puis sur OFF. La prochaine fois que vous alimenterez votre carte, elle positionnera les servomoteurs ainsi que la gradation des actionneurs à la dernière sauvegarde effectuée.
IV - Mise en oeuvre informatique
La carte est directement compatible avec tout système (logiciel sur ordinateur, carte ZIP, ...) capable d'envoyer des ordres Midi de type Control Change.
Chaque actionneur obéit à un (ou deux suivant le mode) Control Change différent et peut aller jusqu'à 127 pas (mode 7 bits) ou 16383 pas (mode 14 bits) de PWM à 16kHz (donc silencieux pour les moteurs). De même avec les servomoteurs, ils obéissent à un (ou deux suivant le mode) Control Change différent et peut aller jusqu'à 128 pas (mode 7 bits) ou 8000 pas (mode 14 bits).
Trois paramètres sont nécessaires : le canal, le numéro de Control Change et la valeur de Control Change.
Remarque : la valeur d'un Control Change varie entre 0 et 127 et est indépendante de son numéro.
- Il faut que ce Control Change s'adresse au canal Midi pour lequel la carte est configurée.
- Le numéro de ce Control Change dépend du numéro de l'actionneur/servomoteur sur la carte et du numéro de la carte, conformément au tableau ci-dessus.
Exemple : l'actionneur n°2 sur la carte configurée pour être la n°4 répond au Control Change n°25.
Calcul du Control Change en fonction du numéro de carte et de l'actionneur :
Control Change = (numéro carte – 1) × 8 + (numéro de l'actionneur – 1)
Cette formule peut se transposer en code ou en patch.
- Le comportement de l'actionneur/servomoteur dépend de la valeur associée au Control Change.
Remarque au mode 14 bits :
Pour bien piloter vos actionneurs sur 16383 pas, ou vos servomoteurs sur 8000 pas, il faut envoyer d'abord la valeur contenant le poids fort, et ensuite envoyer la valeur du poids faible, et c'est seulement à la réception de la valeur du poids faible que l'actionneur effectue l'ordre.
Vous pouvez consulter le patch de test de la carte 4 servomoteurs 4 gradations sur Max/MSP, il y a une abstraction spécialement créée pour ce mode.
Précautions d'emploi
Les précaution d'emploi sont détaillées ici.