
Isadora
|
|
La visualisation des données provenant des capteurs est indispensable à leur utilisation. Ces patches permettent de mémoriser les dernières données provenant des capteurs, au cours du temps, au fur et à mesure qu’elles arrivent.
La mise en mémoire des données successives dans le registre peut se faire à deux rythmes différents :
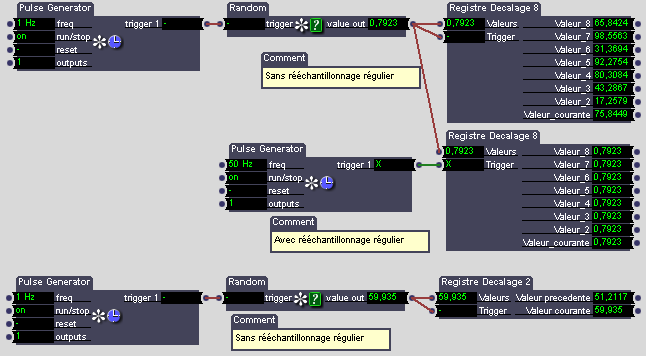
soit sans rééchantillonnage des données : les valeurs arrivent au rythme où le capteur les envoie, et restent à la même position dans le registre jusqu’à ce qu’elles soient poussées par l’arrivée de nouvelles valeurs. Si le capteur n’émet pas de valeur régulièrement, s’il n’en envoie que lorsque sa valeur change, le rythme de réception n’est pas régulier. L’intérêt est de voir les valeurs brutes du capteur. L’inconvénient est que la dimension temporelle se perd visuellement.
soit avec rééchantillonnage régulier des données : que les valeurs aient changé ou pas, elles sont mise à jour régulièrement. Si une valeur n’est pas modifiée, elle se répète dans le registre jusqu’à ce qu’une nouvelle valeur arrive. L’intérêt est de représenter l’état réel du capteur au cours du temps. L’inconvénient est lié à la fréquence de rééchantillonnage : il ne faut pas qu’elle soit plus lente que le débit du capteur, sinon des données sont perdues (pour le radar par exemple).
Le rééchantillonnage se fait par Pulse generator qui donne un débit
régulier au cours du temps.
Patches de test
 Patch .izz : Classement de données par registre à décalage
Patch .izz : Classement de données par registre à décalage
L’exemple utilise un envoi lent de valeurs aléatoires pour montrer le classement chronologique qui s’effectue sur les sorties de l’actor Registre Decalage 8. Le registre de 8 valeurs est très utile pour afficher les données des capteurs analogiques (voir la page Visualisation).
Pour des raisons simplement pratiques de câblage dans l’actor, la valeur la plus récente (valeur courante) apparaît sur la sortie du bas de l’Actor Registre Décalage, tandis que les valeurs précédentes s’empilent chronologiquement vers le haut, jusqu’à la plus ancienne qui est sur la sortie la plus haute.
Le registre de 2 valeurs est destiné à des applications très variées, par exemple pour savoir dans quel sens varie un capteur.
Si seulement 8 données dans un registre ne suffisent pas, les registres peuvent s’enchaîner l’un sur l’autre, en connectant la sortie de la donnée la plus ancienne (en haut) du premier registre à l’entrée Valeurs du suivant.

 Actor .iua : Registre à décalage mémorisant 8 valeurs successives
Actor .iua : Registre à décalage mémorisant 8 valeurs successives

Pour voir une image agrandie du sous-patch : ici.
{kind=link}
La première entrée de l’actor Registre permet de connecter les données du capteur que l’on veut observer.
La deuxième entrée permet d’activer l’envoi de la donnée dans le registre. Cet envoi peut se faire ponctuellement, seulement lorsque la donnée arrive (cas du registre d’en haut dans le patch izz) ou bien régulièrement avec un Pulse Generator (cas du registre du bas dans le patch). Il y a alors dans ce dernier cas un rééchantillonnage régulier des données, qui facilite l’observation des événements en temps réel.
Actor .iua : Registre à décalage mémorisant 2 valeurs successives

Cet actor n’a que deux sorties, donnant la valeur courante, qui vient d’être envoyée dans l’entrée valeurs, et la valeur précédente. Comme précédemment, la valeur n’est prise en compte que lorsque l’entrée trigger a été activée.
Ce patch a été fait avec la version 0.9b6 d’Isadora PC. Si vous ne pouvez l’ouvrir directement (dans une version précédente d’Isadora par exemple), il suffit de le recopier, les objets utilisés étant présents dans toutes les versions d’Isadora.